Підводний апарат
 Підводна АПАРАТ (а. Submarine unit; н. Unterwassergerat; ф. Appareil sous-marin; і. Equipo submarino) - судно або технічний пристрій, що переміщається в товщі води і (або) по дну і використовується для наукових досліджень, пошукових і аварійно-рятувальних операцій, а також виробничих робіт під водою. Зокрема, підводні апарати застосовуються для проведення геологічних і геофізичних вимірювань поблизу океанського дна з метою вивчення геологічної будови дна океану , Складу створюваних його порід, пошуку і розвідки родовищ корисних копалин в світовому океані , А також при експлуатації родовищ, для огляду і ремонту бурових платформ і т.п.
Підводна АПАРАТ (а. Submarine unit; н. Unterwassergerat; ф. Appareil sous-marin; і. Equipo submarino) - судно або технічний пристрій, що переміщається в товщі води і (або) по дну і використовується для наукових досліджень, пошукових і аварійно-рятувальних операцій, а також виробничих робіт під водою. Зокрема, підводні апарати застосовуються для проведення геологічних і геофізичних вимірювань поблизу океанського дна з метою вивчення геологічної будови дна океану , Складу створюваних його порід, пошуку і розвідки родовищ корисних копалин в світовому океані , А також при експлуатації родовищ, для огляду і ремонту бурових платформ і т.п.
Підводні апарати діляться на 3 основні класи: населені нормобарической, населені гіпербаричної і незаселені (телекеровані). Підводні апарати класифікуються також за типом виконуваних робіт - на гідрофізичні, геологічні, пошукові, спеціалізовані робочі, оглядові та ін .; за характером переміщень у водному середовищі - на буксирувані, плаваючі, що переміщаються (в т.ч. крокуючі) по грунту; за способом подачі електроживлення - на прив'язні, автономні і комбіновані; по глибині проведення робіт - для малих глибин (до 600 м), середніх глибин (до 2000 м) і глибоководні (понад 2000 м).
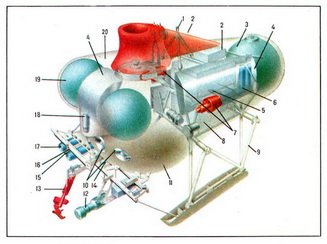
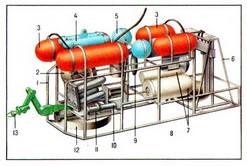
До нормобарической населеним підводним апаратів відносяться прив'язні і автономні дослідницькі та транспортні засоби, в герметичному корпусі яких підтримуються параметри дихальної суміші, близькі до нормативних атмосферних. Прикладом апаратів цього типу є підводний апарат "Пайсіс", призначений для океанологічних (в т.ч. геологічних) досліджень (рис. 1).
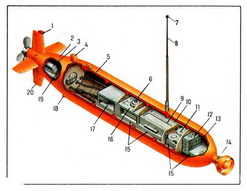
Він складається з міцного металевого корпусу (населеного відсіку), навколо якого на трубчастій рамі змонтовані окремі елементи різних бортових функціональних систем: движительно-рульового комплексу, службовця для пересування і маневрування підводного апарату на поверхні і під водою; електроенергетичної установки; системи занурення і спливання, що забезпечує значну зміну плавучості шляхом заповнення водою або продувки повітрям цистерн головного баласту; уравнительно-діфферентная системи, що дозволяє змінювати в широких межах кут нахилу (диферент), швидкість занурення і спливання підводного апарату аж до зависання апарату на обраному робочому горизонті . Апарат забезпечений також системами: гідравліки, що служить для приводу забортного навісного обладнання і маніпуляторів; наукової інформації, що включає в себе датчики океанологічних параметрів, що реєструє апаратуру і фототелевізійна комплекс; зв'язку і навігації, необхідної для визначення місцезнаходження апарату і передачі інформації з підводного апарату на поверхню і назад. Склад повітряної суміші, температура і вологість в жилому відсіку підтримуються системою життєзабезпечення. Для надання необхідної зовнішньої форми апарату служить знімний легкий корпус. Спрощеної модифікацією нормобарична населених підводних апаратів є спускаються на тросі з надводного судна батисфери і Гідростат - товстостінні спостережні камери, здатні витримувати тиск великих глибин, з ілюмінаторами і вхідним люком, оснащені світильниками, фотокіноаппаратурой, телефонним зв'язком і вимірювальними приладами. Гідростат на відміну від кулястих Батисфера мають циліндричну форму зі сферичними днищами. Для досягнення граничних глибин (до 11 км) використовуються батискафи (рис. 2) - населені підводні апарати, що складаються з легкого сталевого корпусу-поплавка, наповненого для створення позитивної плавучості бензином, і жорстко з'єднаної з ним батисфери (гондоли), в якій розміщується екіпаж , наукові прилади та обладнання розміщено.
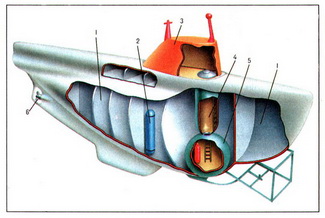 Спливання і занурення батискафа забезпечується за рахунок скидається змінного баласту. Однак, незважаючи на можливість досягнення граничних глибин, батискафи мають малу маневреність, а також значну масу і габарити , Що викликає проблему транспортування підводних апаратів на великі відстані.
Спливання і занурення батискафа забезпечується за рахунок скидається змінного баласту. Однак, незважаючи на можливість досягнення граничних глибин, батискафи мають малу маневреність, а також значну масу і габарити , Що викликає проблему транспортування підводних апаратів на великі відстані.
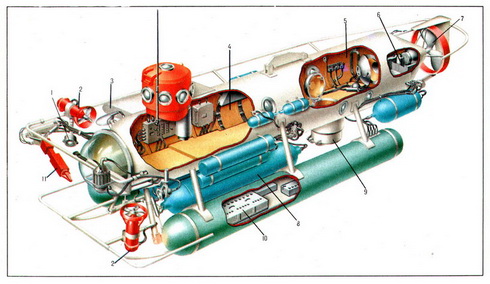
У гіпербаричних населених підводних апаратах акванавт виконує роботу безпосередньо у водному середовищі в умовах підвищеного тиску (див. Водолазні роботи). До гіпербаричної відносяться населені підводні апарати з виходом водолазів в воду (рис. 3), в т.ч. мобільні підводні технічні бази та лабораторії.
Основні переваги цих апаратів - можливість доставки акванавтів на значні відстані від місця занурення і забезпечення тривалої їх роботи під водою, а також можливість стикування з камерами підводних технічних комплексів і транспортування в них назад людей і устаткування. Конструктивно такі підводні апарати багато в чому аналогічні нормобарической населеним апаратів і відрізняються від них наявністю водолазного відсіку, призначеного для транспортування водолазів під тиском, що відповідає тиску навколишнього середовища на робочому горизонті; балонів для зберігання газових сумішей системи життєзабезпечення водолазів, великою кількістю навісного обладнання та інструменту, а також джерелами енергії значної потужності.
До нежилим підводним апаратів відносяться занурюються під воду і керовані з поверхні технічні засоби, оснащені спеціальним обладнанням, приладами та інструментами, що відповідають характеру виконуваних завдань. У цей клас входять різноманітні за призначенням і конструкції прив'язні, буксируються автономні телекеровані підводні апарати Типовим представником цього класу є прив'язний телекерований підводний апарати "СФ-1" (рис. 4), що складається з прямокутної трубчастої рами, на якій встановлені цистерни позитивної плавучості, діфферентная цистерна, балон зі стисненим повітрям для продувки баластних-діфферентная системи.
 У центральній частині рами змонтовані контейнери з електронною апаратурою і станцією гідравліки. Движительно комплекс включає в себе гвинти горизонтального і вертикального ходу. Апарат оснащений буровим блоком, батометрами, фототелекамерамі, датчиками фізичних і хімічних параметрів води, маніпулятором. Сигнали з навігаційних приладів (гірокомпас, лага, ехолота і ін.), Встановлених на підводному апараті, по кабелю надходять в ЕОМ, розташовану на що забезпечує судні, що дозволяє управляти апаратом з великою точністю. Буксирувані телекеровані підводні апарати зазвичай не мають рушійних комплексів і діфферентная систем, а їх переміщення здійснюється за рахунок ходу судна-носія. Такі підводні апарати в основному являють собою гідроакустичні й (або) фототелевізійні комплекси, призначені для зйомки і картографування донної поверхні. Автономні телекеровані підводні апарати (рис. 5) відрізняються відсутністю кабельної лінії зв'язку і електропостачання з судна-носія.
У центральній частині рами змонтовані контейнери з електронною апаратурою і станцією гідравліки. Движительно комплекс включає в себе гвинти горизонтального і вертикального ходу. Апарат оснащений буровим блоком, батометрами, фототелекамерамі, датчиками фізичних і хімічних параметрів води, маніпулятором. Сигнали з навігаційних приладів (гірокомпас, лага, ехолота і ін.), Встановлених на підводному апараті, по кабелю надходять в ЕОМ, розташовану на що забезпечує судні, що дозволяє управляти апаратом з великою точністю. Буксирувані телекеровані підводні апарати зазвичай не мають рушійних комплексів і діфферентная систем, а їх переміщення здійснюється за рахунок ходу судна-носія. Такі підводні апарати в основному являють собою гідроакустичні й (або) фототелевізійні комплекси, призначені для зйомки і картографування донної поверхні. Автономні телекеровані підводні апарати (рис. 5) відрізняються відсутністю кабельної лінії зв'язку і електропостачання з судна-носія.
При цьому керуючі та інформаційні сигнали передаються по гідроакустичного каналу. Такі підводні апарати зазвичай складаються з корпусу обтічної форми з розміщеними всередині блоками навігаційних приладів і управління движительно-рульового комплексу, джерелами струму відносно великий енергоємності і розвиненими бортовими системами збору і обробки інформації.
Телекеровані підводні апарати зазвичай мають малі масу і габарити, володіють необмеженим часом роботи під водою і високою маневреністю. Жилі підводні апарати на відміну від телекерованих більш універсальні за призначенням, дозволяють проводити унікальні візуальні спостереження і відбір великої кількості зразків донних порід.
Історичний нарис. До перших підводним апарати відносяться підводні човни малої водотоннажності, побудовані з дерева голландським механіком К. ван Дреббелем (1620) і російським винахідником-самоуком Е. Ніконов (1724). У 1776 була створена металева підводний човен "Черепаха" американським інженером Д. Бушнелл, з 30-х рр. 19 століття аналогічні підводні апарати стали будуватися в Росії, Німеччині і Франції , Спочатку створювалися нормобарической населені прив'язні підводні апарати. У 1911 американським інженером Г. Гартманом був побудований перший гідростат, в якому з науковими цілями була досягнута глибина 640 метрів. У 1923 в CCCP інженером Е. Г. Даниленко був створений гідростат, призначений для пошуку затонулих суден. У 1927 на ньому зробила занурення по геологічній програмі геолог М. В. Кленова (перша жінка-Гідронавт). У 1929 американські вчені У. Бібі і О. Бартон сконструювали першу батисфері "Століття прогресу", яка дозволила досягти глибини понад 1300 м.
 Перші розрахунки і проекти автономних населених підводних апаратів були запропоновані в середині 30-х рр. радянськими вченими К. Е. Ціолковським і Ю. А. Шиманським. У 1948 перший автономний підводний апарат - батискаф "ФРНС-2" був побудований швейцарським ученим О. Піккаром і при випробуваннях без екіпажу на борту досяг глибини 1400 метрів. За проектами О. Піккара у Франції і Італії були створені в 1953 досконаліші батискафи "ФРНС-3" і "Трієст" (в 1960 Ж. Піккар і Д. Уолш досягли дна Маріанської западини).
Перші розрахунки і проекти автономних населених підводних апаратів були запропоновані в середині 30-х рр. радянськими вченими К. Е. Ціолковським і Ю. А. Шиманським. У 1948 перший автономний підводний апарат - батискаф "ФРНС-2" був побудований швейцарським ученим О. Піккаром і при випробуваннях без екіпажу на борту досяг глибини 1400 метрів. За проектами О. Піккара у Франції і Італії були створені в 1953 досконаліші батискафи "ФРНС-3" і "Трієст" (в 1960 Ж. Піккар і Д. Уолш досягли дна Маріанської западини).
Малогабаритний, легкотранспортіруемую підводний апарат для малих глибин ( "пірнає блюдце") вперше був побудований в 1959 під керівництвом французького океанолога Ж. Іва Кусто. Починаючи з 60-х рр. в різних країнах інтенсивно будуються малогабаритні автономні населені підводні апарати. Якщо в 1970 в світі налічувалося 45 населених підводних апаратів, то в 1986 - понад 300 апаратів. Велика частина автономних населених підводних апаратів розрахована на глибини до 1500 метрів. Для збільшення глибини з початку 80-х рр. сталеві населені сфери населених підводних апаратів замінюються більш легкими титановими. Будівництво в 1967 (в США) першого гіпербаричної підводного апарату "Діп Дайвер" поклало початок розвитку подібних апаратів з виходом водолазів в воду. Створюються мобільні великотоннажні (до 800 т) підводні дослідні та технічні апарати, що забезпечують роботу і відпочинок водолазів в режимі тривалого перебування під тиском.
Попередником сучасних телекерованих апаратів є підводний апарат "КУРВ-I", розроблений в 1965 в США для проведення пошуку і підйому затонулих об'єктів на поверхню. У наступні роки з'явилися телекеровані підводні апарати нового покоління, які мають збільшену глибину, більш досконалу фототелевізійна і гідроакустичні апаратуру, а також маніпуляторні пристрої (наприклад, "КУРВ-II", "КУРВ-III", "Теленавт-1" - США , "Манта" - CCCP ). Виробництво підводних апаратів цього типу постійно збільшується (в 1970 в світі налічувалося 26 телекерованих підводних апаратів, ДО 1986 створено понад 400 апаратів). У 80-х рр. створюються повністю автоматичні автономні телекеровані підводні апарати з робочою глибиною занурення 6000 м.
 Серед прив'язних телекерованих підводних апаратів за кордоном з початку 80-х рр. набули поширення малогабаритні (до 800 мм), легкі (до 100 кг) і мобільні прив'язні апарати (типу "PCB-225" і "Скорпіо" - США; "Трек" - Канада), для доставки яких до місця роботи використовуються спеціальні підводні бокси -носії, пов'язані з забезпечує судном кабелем-тросом, а з апаратом тонким кабелем нейтральної плавучості, що не робить вплив на його динаміку. На наступних зразках телекерованих підводних апаратів (типу "Троу" - Канада і "СФ-1" - ФРН) встановлюються баластні системи, що збільшують маневреність апаратів і дозволяють здійснювати жорстку посадку на грунт для виробництва бурильних робіт.
Серед прив'язних телекерованих підводних апаратів за кордоном з початку 80-х рр. набули поширення малогабаритні (до 800 мм), легкі (до 100 кг) і мобільні прив'язні апарати (типу "PCB-225" і "Скорпіо" - США; "Трек" - Канада), для доставки яких до місця роботи використовуються спеціальні підводні бокси -носії, пов'язані з забезпечує судном кабелем-тросом, а з апаратом тонким кабелем нейтральної плавучості, що не робить вплив на його динаміку. На наступних зразках телекерованих підводних апаратів (типу "Троу" - Канада і "СФ-1" - ФРН) встановлюються баластні системи, що збільшують маневреність апаратів і дозволяють здійснювати жорстку посадку на грунт для виробництва бурильних робіт.
Одним з перших незаселених буксируваних підводних апаратів з'явився Океанологічний комплекс "Діп тоу", створений в 1963 в США. У наступні роки були створені буксирувані підводні апарати ( "Ангус", "ДСС-125", і "Арго" - США, "Звук" - CCCP), що дозволяють здійснювати пошукові операції, картографування і фотозйомку дна. На початку 80-х рр. в ФРН був побудований буксируваний геологорозвідувальний підводний апарат "Манка-01", призначений для відбору і експрес-аналізу проб залізо-марганцевих конкрецій .
Перші геологічні дослідження із застосуванням підводних апаратів були проведені в 1962 з борту французького батискафа "Архімед" в жолобі Пуерто-Ріко (близько 9000 м). У наступні роки виконувалися обстеження берегових каньйонів, коралових рифів , полів залізо конкрецій і фосфоритів . З 70-х рр. було організовано кілька американських і французьких геологічних експедицій з вивчення океанічних рифтових зон (в 1973 - Серединно-Атлантичного Рифт , В 1978-79 - зони східно-Тихоокеанського підняття і Галапагосского рифту).
Перші радянські участь у геологічних експедиціях з використанням підводного апарату типу "Пайсіс", "Звук", "Манта" були проведені на озері Байкал (1977), в красноморского Рифт (1979-80) і Рифт Рейкьянес в Атлантичному океані , в Тихому океані (80-і рр.).